Hello, I'm
Imad-Eddine NACIRI
I build robots that perceive, decide, and act. From autonomous ground vehicles to aerial drones and industrial manipulators, I engineer intelligence into motion.

About Me
Skills & Expertise
Technologies I work with daily
Programming Languages
Robotics & Navigation
AI & Machine Learning
Embedded & Hardware
Simulation & Modeling
Software & Tools
Featured Projects
Recent work in robotics, AI, and embedded systems
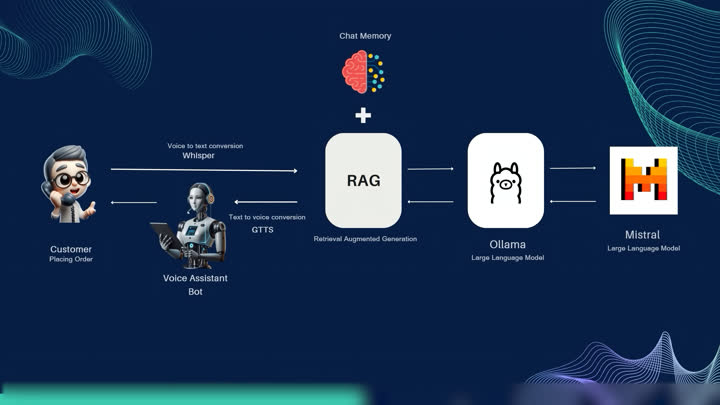
Real-Time AI Voice Assistant for Multisensory Artwork Exploration
Graduation project (PFE) conducted at LITIS Laboratory, Rouen University. A fully local, open-source real-time voice assistant that helps visually impaired visitors explore the Bayeux Tapestry through natural voice conversations — combining Whisper STT, Llama3 / Mistral LLMs with RAG, and gTTS.
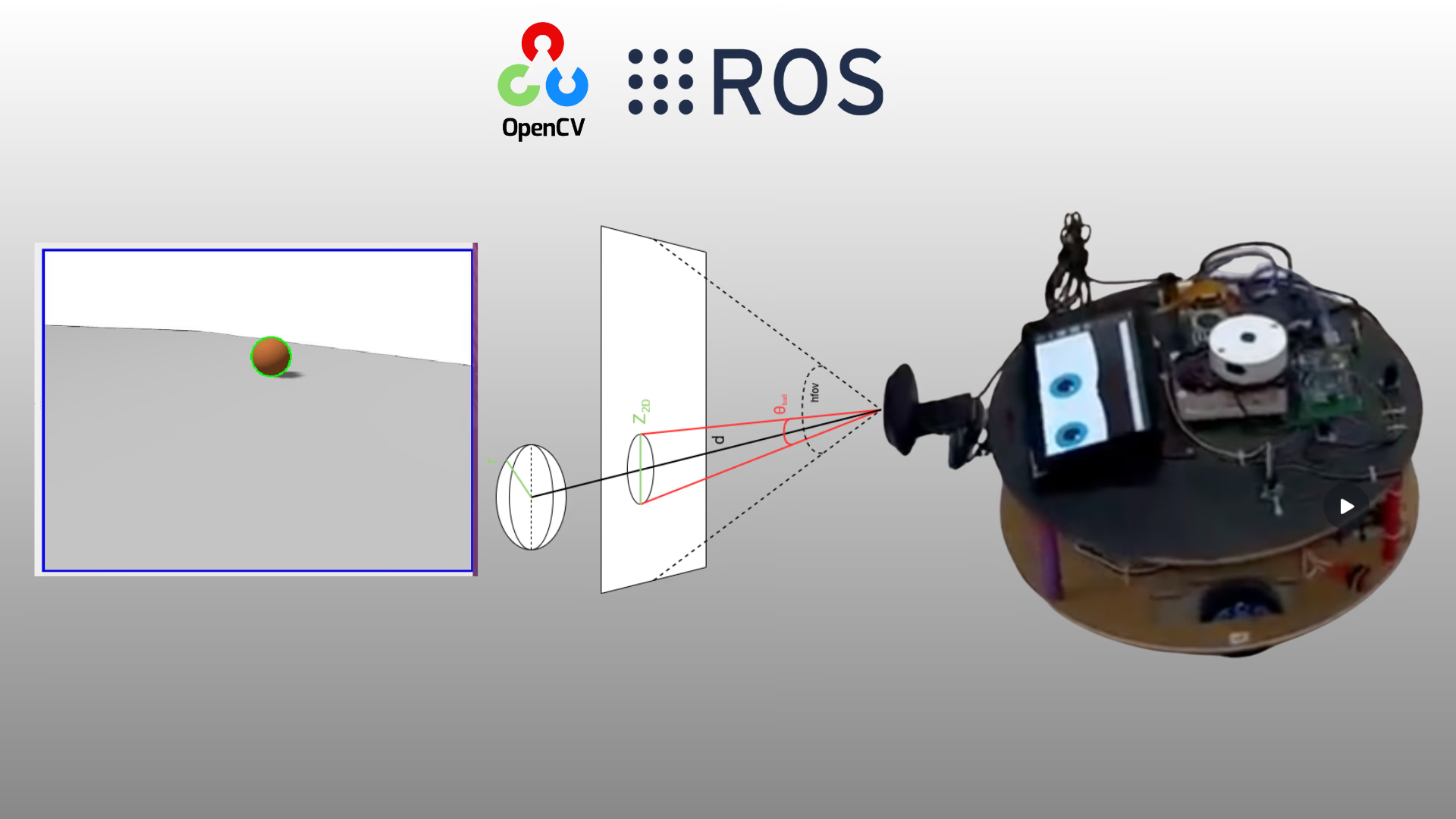
Vision-Based 3D Object Coordinate Estimation and Tracking
ROS 2 framework for real-time object detection, monocular 3D localization using camera geometry, and PID-based reactive tracking — validated in Gazebo simulation and on a real differential-drive robot.
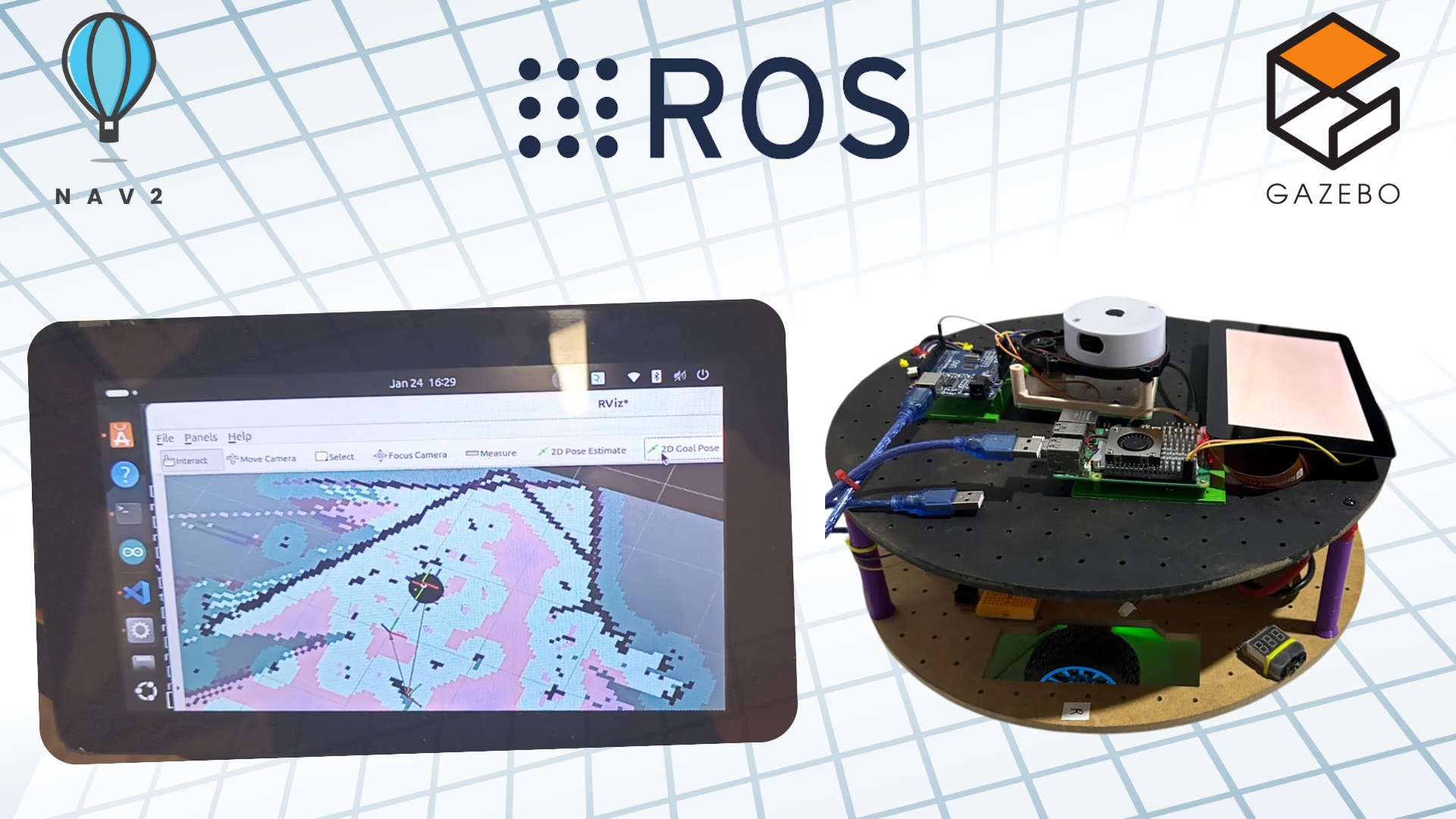
SLAM-Based Autonomous Navigation in ROS 2
Built a complete autonomous navigation stack in ROS 2 — from URDF modeling and ros2_control, through Grid-Based FastSLAM and AMCL localization, to the full Nav2 stack — validated in Gazebo and deployed on a real differential-drive robot.
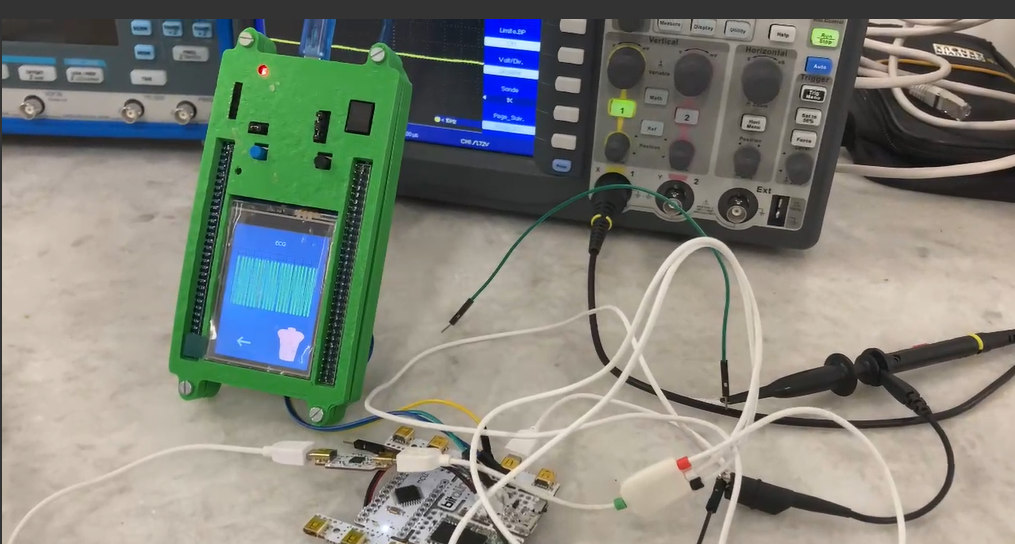
SigMedX – RTOS-based Portable e-Health Device
Developed **SigMedX**, a portable biomedical device capable of acquiring, processing, and visualizing real-time biosignals (ECG, EEG, EMG, and EDA). Built using the BITalino sensor suite, STM32F4 board, FreeRTOS, and TouchGFX for GUI. Enables users to monitor physiological data from anywhere with a compact, user-friendly interface.
Experience
My professional journey
Certifications







Testimonials
What mentors say about me